Location: Home >> Detail
J Sustain Res. 2026;8(2):e260052. https://doi.org/10.20900/jsr20260052
 ,
Muhammad Ehtsham * ,
Valerio Di Rocco ,
Vincenzo Stornelli
,
Muhammad Ehtsham * ,
Valerio Di Rocco ,
Vincenzo Stornelli
Department of Industrial and Information Engineering and Economics, University of L’Aquila, 67100 L’Aquila, Italy
* Correspondence: Muhammad Ehtsham.
Technological innovation is no longer optional but essential for shaping the future of mobility toward safer, smarter, and more sustainable systems. This study presents a comprehensive feasibility analysis for the development of a 5 km smart road corridor in a mountainous terrain, designed to support autonomous and connected vehicle circulation. Building upon successful experiments conducted in cities with relatively flat terrains, the project adapts these experiences to a more complex topographical and climatic context characterized by steep gradients, sharp curves, and seasonal variability. The analysis integrates technical, economic, and environmental dimensions, focusing on infrastructure readiness, safety enhancement, and sustainability outcomes. Economic viability is assessed through established financial indicators, including Net Present Value (NPV), Internal Rate of Return (IRR), and the Payback Period. The findings confirm the project’s feasibility and emphasize its potential as a strategic investment for road safety, emission reduction, and innovation-driven territorial development. Beyond its regional relevance, the proposed methodological framework demonstrates strong transferability, offering a replicable model for the assessment and implementation of smart road systems in diverse geographic and socio-economic contexts worldwide. This positions the study as a scalable contribution to the global transition toward autonomous and connected mobility.
ADAS, advanced driver assistance systems; AI, artificial intelligence; ANAS, national autonomous roads corporation (Italy); AUA, autorizzazione unica ambientale (environmental single authorization); AV, autonomous vehicle; C-V2X, cellular vehicle-to-everything; cm, centimetre; CVMS, cloud-based vehicle monitoring System; DSRC, dedicated short-range communications; Edge Computing, local processing at the network edge; EU, European Union; FLIR, forward-looking infrared; FSD, full self-driving; GDPR, general data protection regulation; GHz, gigahertz; GPS, global positioning system; GPU, graphics processing unit; HMM, hidden markov model; IN2CCAM, horizon Europe project for connected & automated mobility; IRR, internal rate of return; ITS, intelligent transport systems; kW, kilowatt; kWh, kilowatt-hour; Km, kilometre; m, metre; m², square metre; MIT, Italian Ministry of Infrastructure and Transport; MIMIT, Ministry of Business and Made in Italy; NPV, net present value; NRRP/PNRR, National Recovery and Resilience Plan; PEST, political, economic, social, technological; radar, radio detection and ranging; RGB-PVRCNN, RGB point-voxel region-based convolutional neural network; ROI, return on investment; RSU, road-side units; Sensor Fusion integration of data from multiple sensors; SWOT, strengths, weaknesses, opportunities threats; V2X, vehicle-to-everything; V2V, vehicle-to-vehicle; V2I, vehicle-to-infrastructure; V2P, vehicle-to-pedestrian; V2N, vehicle-to-network; V2G, vehicle-to-grid; VisLab, university of parma autonomous driving laboratory; W, watt
Technological innovation is no longer a choice but a necessity: mobility systems must increasingly adapt to connected, automated, and safety-oriented environments [1]. Autonomous driving and smart road development are part of a global ecosystem of experiments, partnerships, and investments redefining contemporary mobility paradigms [2,3]. Several multinational companies are actively developing and testing autonomous driving technologies. Waymo [4], a spin-off of Google, represents one of the most advanced actors in autonomous driving experimentation, investing over $3 billion and testing thousands of kilometers in Arizona and California, with robotaxi shuttles operating without safety drivers. Tesla [5], through its Full Self Driving (FSD), emphasizes computer vision and onboard processing, reducing reliance on LiDAR, with large-scale fleet data used to continuously improve algorithms. Aptiv-Lyft [6] has conducted large-scale shared mobility experiments in cities like Las Vegas, transporting over 100,000 passengers. At the European level, European projects such as Horizon Europe, IN2CCAM, and C-Roads promote integrated approaches to autonomous and connected mobility, testing autonomous shuttles in urban living labs (e.g., Torino) to study pedestrian and cyclist interaction. FLIR Systems [7] develops thermal cameras adapted from military to automotive applications, for detecting people and animals in low visibility. These experiences collectively highlight the dual challenge of ensuring safety while achieving economic scalability, integrating autonomous systems with existing mobility services.
In Italy, VisLab (Universities of Parma and Torino) [8] was the first in Italy authorized to test autonomous vehicles on public roads since 2019, validating perception and planning algorithms in urban scenarios. Autostrade per l’Italia [9] is developing smart road pilot projects in Tuscany with Road-Side Units (RSU), advanced sensors, and V2X connectivity. Eurotech (Friuli) provides edge computing and distributed sensing modules for multiple European smart mobility projects. The Torino Living Lab [10] integrates autonomous shuttles, urban sensors, and monitoring platforms with a multi-level governance model.
Finally, the EX-EMERGE Project (Abruzzo) [11], in collaboration with the University of L’Aquila, explores advanced V2X and AI applications in complex and heterogeneous environments, serving as a relevant experimental basis for the Roio-L’Aquila corridor.
Previous pilot initiatives such as the Torino Living Lab and the VisLab experiments in Parma provide relevant benchmarks for connected and autonomous mobility experimentation. However, these initiatives differ from the proposed Roio–L’Aquila corridor in several key aspects. From a technological perspective, earlier projects mainly focused on vehicle-centered experimentation within urban sensing environments, whereas the present study emphasizes infrastructure-based sensing and cooperative perception systems. From an operational perspective, the Torino and Parma initiatives were implemented in relatively regular urban road networks, while the proposed corridor addresses the challenges associated with mountainous terrain and limited visibility conditions. These differences highlight the relevance of evaluating smart infrastructure feasibility in geographically complex environments.
The concept of smart roads has emerged as a cornerstone of intelligent transportation systems (ITS), enabling continuous interaction between vehicles, infrastructure, and digital platforms through advanced sensing, communication, and control technologies [12,13]. Smart road infrastructures integrate RSU, distributed sensor networks, high-definition mapping, and real-time data analytics to support connected and autonomous vehicles (CAVs) under dynamic traffic and environmental conditions [14]. Recent studies highlight that smart roads significantly enhance traffic efficiency, reduce congestion, and improve situational awareness by enabling continuous Vehicle-to-Infrastructure (V2I) and Vehicle-to-Everything (V2X) communications [15–17]. These systems allow infrastructure to actively contribute to perception, decision-making, and cooperative maneuvering, shifting from passive to intelligent and adaptive road environments.
V2X communication technologies, including Dedicated Short-Range Communication (DSRC) and Cellular Vehicle-to-Everything (C-V2X), represent the backbone of cooperative autonomous driving [18]. V2X enables the low-latency exchange of safety-critical information among vehicles, infrastructure, pedestrians, and cloud platforms [19]. Several large-scale pilot projects across Europe, China, and the United States have demonstrated the effectiveness of V2X in reducing collision risks, improving traffic flow stability, and supporting automated driving functions such as cooperative adaptive cruise control, intersection management, and platooning [20,21]. European initiatives, particularly under the C-Roads and Horizon Europe programs, emphasize cross-border interoperability, cybersecurity, and infrastructure harmonization to ensure large-scale deployment consistency across heterogeneous road networks [22,23].
Autonomous driving technologies have experienced rapid advancement over the last decade due to the convergence of artificial intelligence, high-performance computing, and multimodal sensor fusion. State-of-the-art autonomous systems rely on integrated perception pipelines combining LiDAR, radar, RGB cameras, thermal imaging, and GNSS to ensure robust and reliable environment perception across diverse operating conditions [24]. AI technologies, including machine learning and deep learning models, have been widely adopted across multiple domains and play a key role in enabling data-driven and sustainable mobility systems [25,26]. Similarly, deep learning architectures, such as convolutional neural networks and perception-oriented frameworks (e.g., voxel-based object detection and semantic segmentation), have demonstrated high accuracy in obstacle detection, trajectory prediction, and driving policy generation [27]. However, despite strong performance in controlled urban environments, fully autonomous driving in complex, unstructured, and mountainous terrains remains a significant and still unresolved technological and operational challenge [28].
Several real-world smart road and autonomous driving testbeds in various parts of the world provide valuable reference frameworks for large-scale implementation [29,30]. The Torino Living Lab represents one of the most advanced European urban pilots, integrating autonomous shuttles, traffic sensors, V2X infrastructure, and centralized traffic management platforms under a multi-level governance structure. Similarly, the Parma and VisLab experiments have validated cooperative perception, AI-based driving policies, and mixed-traffic interaction in predominantly flat urban environments. These initiatives confirm the technical feasibility of smart corridors but also reveal scalability challenges related to infrastructure costs, cybersecurity, public acceptance, and long-term economic sustainability. While additional applications in sustainable urban logistics, such as the implementation of Light Electric Freight Vehicles in the historical centre of Quito, demonstrate the importance of coordinated planning of fleet composition, infrastructure location, routing optimization, and regulatory support [31], their direct applicability to smart road infrastructures for autonomous driving remains limited. Recent interdisciplinary research concludes that user adoption of autonomous mobility services is shaped by a combination of economic value, perceived performance, and risk perception, alongside demographic factors. Empirical evidence from large-scale surveys on robo-taxi adoption highlights that performance expectancy enhances willingness to use, while perceived risk remains a key barrier to acceptance [32]. Recent research shows that smart transportation systems can significantly reduce carbon emission intensity, with digital infrastructure and green innovation playing pivotal roles in both macro- and micro-level impacts [33]. Empirical studies also highlight how the strategic deployment of EV charging stations by manufacturers can enhance adoption rates, especially when integrated with vehicle range and infrastructure planning [34].
Recent research has further advanced the analytical modeling of intelligent transportation systems in smart city environments. In particular, trajectory prediction and vehicle interaction modeling have been investigated to improve cooperative perception and decision-making in connected vehicle ecosystems. For example, Lu et al. (2025) [35] proposed a hyper-relational interaction modeling framework capable of capturing complex interactions among multiple traffic agents in intelligent connected vehicle environments. In parallel, optimization approaches have been increasingly applied to dynamic mobility systems and urban logistics operations. Armayau et al. (2025) [36] developed a dynamic vehicle routing optimization model capable of adapting distribution routes in response to real-time demand fluctuations, highlighting the importance of adaptive and responsive mobility systems within digitally connected transport infrastructures.
From these experiences, several key lessons have emerged. First, safety must be guaranteed through technological redundancy, fault-tolerant architectures, and emergency fallback protocols to ensure operational reliability under sensor failures, adverse weather, and unexpected obstacles. Second, European smart road deployments prioritize deep infrastructure integration rather than purely vehicle-centric autonomy, emphasizing cooperative intelligence between vehicles and road operators. Third, successful projects consistently rely on strong public–private partnerships involving municipalities, universities, mobility operators, and technology providers to share risks, expertise, and investment burdens. Moreover, economic scalability is increasingly pursued through hybrid business models that combine traditional infrastructure funding with complementary revenue streams such as smart tolling [37], data monetization, digital mobility services, and commercial sponsorship. Despite many advancements, most existing pilot projects remain concentrated in flat or mildly undulating urban environments, where the geometric, climatic, and operational complexity is relatively low. The transferability of smart roads and autonomous driving solutions to hilly and mountainous territories remains largely insufficiently explored in the literature. Steep gradients, sharp curvature, limited visibility, variable microclimatic conditions, and increased wildlife interaction pose significant and interrelated challenges to perception robustness, vehicle control stability, energy efficiency, and communication reliability. Addressing this gap is essential to enable inclusive smart mobility deployment across non-metropolitan and topographically complex regions. In this context, the Roio-L’Aquila corridor represents a relevant and representative real-world case study for evaluating the technical, economic, and environmental feasibility of smart road systems under challenging geomorphological and climatic conditions.
The ability to experiment and adopt innovative solutions in mountainous terrains becomes a strategic lever for territorial competitiveness, road safety, and environmental sustainability. This study contributes to this trajectory by aligning mountainous urban contexts with ongoing smart mobility experiences, outlining a scenario in which safety improvements, accident reduction, and emission mitigation support local and national development.
This research work proposes an economic feasibility analysis for the construction of a 5-km smart road for autonomous vehicles along the Roio-L’Aquila stretch (Abruzzo). This route, traveled daily by thousands of commuters, provides a real-world testbed for validating autonomous, safe, and sustainable mobility solutions. The analysis considers the necessary infrastructure, maintenance, and integration with the existing road network, in compliance with the current regulatory framework. The Ministry of Infrastructure and Transport of Italy reported that every day, approximately 38 million Italians over the age of 12 travel, and each traveler makes an average of 2.55 trips, for a total of 1.96 billion kilometers.
An analysis of origin-destination flows demonstrates the significant role of high-speed rail in connecting major cities but also reveals that over 70% of journeys occur over distances of less than 50 km, with 23% and 58% of vehicle movements (cars, motorcycles, and buses) concentrated on municipal and extra-urban roads, respectively. Italians travel primarily by private vehicles (62%), and the share of sustainable mobility (active or public transport) has not increased for at least twenty years [38].
The research draws inspiration from initiatives already tested in the urban areas of Torino and Parma, where predominantly flat landscapes favored initial testing. Examining international and national experiences helps identify trends and adopt best practices in mountainous and remote areas. The city of L’Aquila, however, presents greater geomorphological complexity (steep slopes and hairpin bends) and more challenging seasonal weather conditions, making it a particularly significant use case for autonomous mobility in hilly and mountainous areas.
Our objective is to assess the technical transferability and economic sustainability of these solutions in this specific context, identifying investment priorities, implementation costs, and expected benefits (road safety, travel time reduction, and environmental impacts). In summary, the objective is to provide a structured cost-benefit assessment and outline an implementation roadmap for the Roio to L’Aquila corridor, capitalizing on the lessons learned from the Parma and Torino trials and adapting them to a more complex territory.
This study’s objectives are not limited to the implementation of an innovative technological infrastructure but also embrace an integrated vision encompassing safety, sustainability, and regional attractiveness. The research focuses on the development, evaluation, and proposed implementation of a smart infrastructure through the implementation of an experimental corridor of approximately 5 km with two-way traffic, equipped with autonomous stops and V2I interaction systems. Another key objective is to improve road safety by reducing accidents along the mountainous road stretch, with particular attention to risks associated with animals and pedestrians crossing wooded areas.
The study also aims to promote environmental sustainability by encouraging the adoption of electric and autonomous mobility, thereby reducing emissions and energy consumption through optimized routes and Vehicle-to-Grid (V2G) interaction.
In addition, the research includes an economic-financial validation of the proposed system, assessing the feasibility of the investment using tools such as Net Present Value (NPV), Internal Rate of Return (IRR), and Payback Period. Finally, the study seeks to strengthen territorial competitiveness and innovation-driven regional development by evaluating the role of the Roio-L’Aquila smart corridor as a strategic catalyst for enhancing regional attractiveness, fostering university-industry collaboration, stimulating high-tech investment, and positioning the case study as a national reference hub for intelligent transport systems and autonomous mobility research in complex terrains.
This research delivers a comprehensive methodological framework and a practical demonstration for the deployment of autonomous and connected mobility in mountainous regions. The study presents an operational smart road corridor that ensures safe, efficient, and sustainable mobility in complex terrain, integrating advanced AI and V2X systems validated through real-world testing. The economic and financial assessment confirms the investment feasibility of such infrastructures while highlighting their social and environmental benefits. Furthermore, the research provides a structured framework for future smart road deployments, offering guidance on infrastructure planning, technology integration, and scalability in both urban and extra-urban contexts, ensuring replicability and adaptability to diverse environmental and regulatory conditions.
This research work, which investigates the smart road project, addresses the pressing need for innovative, safe, and sustainable mobility solutions in complex and hilly terrains. Its significance is multidimensional. The project contributes to advancing road safety through the integration of autonomous driving technologies, real-time V2X communication, and sensor networks aimed at minimizing accidents, particularly in wooded areas and zones with frequent wildlife crossings. The project promotes sustainable mobility by supporting electric and autonomous vehicles and optimizing routes to reduce fuel consumption and emissions. The integration of V2G systems further enables vehicles to interact with the energy grid, encouraging the use of renewable energy sources.
The research work also enhances regional innovation and attractiveness by positioning the mountainous terrain of L’Aquila as a living laboratory for mobility innovation. In doing so, it draws lessons from experiences in flatter urban contexts such as Torino and Parma while adapting solutions to the complex geomorphology and seasonal conditions of the Abruzzo region. In addition, the corridor supports research and teaching activities by functioning as an open-air laboratory where the University and industrial partners can test artificial intelligence algorithms, sensor fusion technologies, and cooperative V2X systems in real-world conditions.
Finally, the study addresses the economic dimension by evaluating the financial viability of the smart road project, ensuring investment efficiency while highlighting the expected social, environmental, and operational benefits.
Overall, the project represents a strategic and scalable initiative that combines technological innovation, territorial development, environmental sustainability, and socio-economic impact.
Research MethodologyThis study adopts a comprehensive, multi-level, and interdisciplinary research methodology integrating technical, economic, regulatory, and experimental approaches to assess the feasibility and performance of a smart road infrastructure for autonomous driving in mountainous terrains. The proposed framework, depicted in Figure 1, is structured into sequential and interrelated phases, ensuring a systematic evaluation from contextual analysis to financial sustainability and future scalability. The methodological approach combines data-driven analysis, digital modeling, real-world testing, and strategic and economic assessment to ensure the robustness and applicability of the proposed smart road system. Specifically, the methodology integrates infrastructure design analysis, V2X system configuration, economic feasibility modeling (NPV, IRR), and real-world operational validation along the selected corridor.
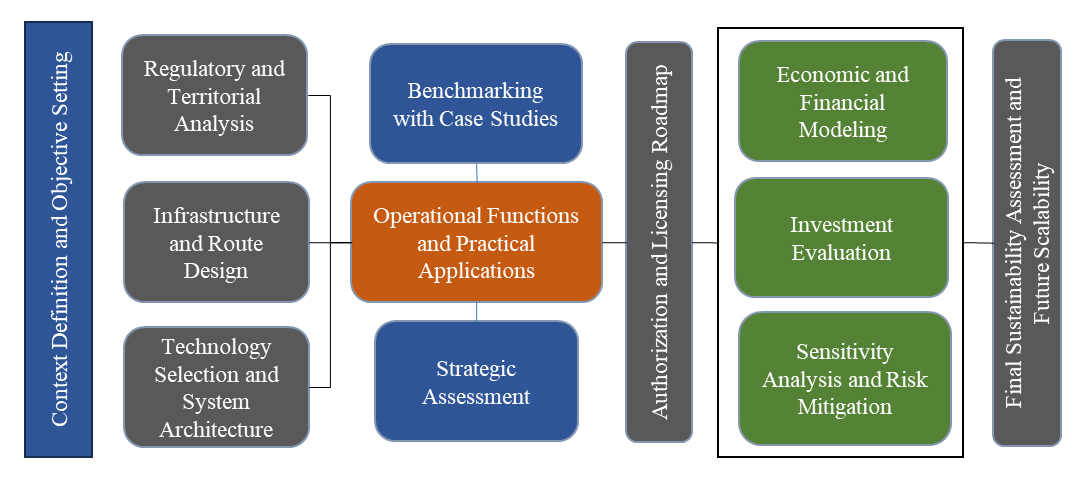 Figure 1. Methodological framework of the research workflow.
Figure 1. Methodological framework of the research workflow.
Phase 1: Context Definition and Objective Setting.
The research work begins with the identification of the Roio-L’Aquila corridor as a real-world testbed for autonomous and connected mobility. This area is selected due to its strategic connection between urban and academic zones, as well as its geomorphological and environmental variability. The core objectives of the project are defined in terms of road safety enhancement, environmental sustainability, economic viability, and territorial innovation.
Phase 2: Regulatory and Territorial Analysis.
A comprehensive review of the national and European regulatory framework governing smart roads and autonomous driving is conducted, including the Italian Smart Road Decree issued by the Ministry of Infrastructure and Transport (MIT), as well as European initiatives such as Horizon Europe and the C-Roads platform. In parallel, a territorial analysis is performed to evaluate geomorphological, climatic, and infrastructural constraints that may influence system performance and deployment.
Phase 3: Infrastructure and Route Design.
Geospatial mapping of the corridor is performed using GIS tools, Google Maps, and Google Earth to precisely characterize the route. Critical points such as sharp curves, forested areas, pedestrian crossings, and visibility constraints are identified. Based on this analysis, a modular smart road architecture is designed to ensure adaptability, resilience, and phased implementation.
Phase 4: Technology Selection and System Architecture.
This phase focuses on the selection and integration of enabling technologies for autonomous mobility. V2X communication systems—including V2V, V2I, V2P, and V2G—are incorporated to enable cooperative driving. A multi-sensor fusion strategy is adopted using LiDAR, radar, AI-based cameras, and thermal cameras. Edge computing nodes and RSU are deployed to ensure real-time processing, low latency, and network reliability.
Phase 5: Operational Functions and Practical Applications.
The operational capabilities of the smart road are defined, including autonomous traffic management, obstacle and animal detection, pedestrian recognition, predictive braking, collision avoidance, and smart parking services. Additionally, the integration with V2G systems is explored for bidirectional energy exchange and grid support.
Phase 6: Benchmarking with National and International Case Studies.
A comparative analysis is conducted with leading international and national smart mobility projects, including Waymo, Tesla, the Turin Living Lab, Parma VisLab, and the EMERGE Project. This benchmarking activity is used to identify best practices, technological maturity levels, and implementation challenges.
Phase 7: Strategic Assessment.
A double-layer strategic evaluation is performed through PEST (Political, Economic, Social, and Technological) and SWOT (Strengths, Weaknesses, Opportunities, and Threats) analyses to assess the macro-environmental conditions and the project’s internal-external positioning.
Phase 8: Authorization and Licensing Roadmap.
This phase defines the administrative and legal pathway for system deployment, including municipal permits, environmental authorization (AUA), MIT testing authorization for autonomous driving, and radio-frequency licensing for V2X communications.
Phase 9: Economic and Financial Modeling.
A detailed economic analysis is developed through technical cost estimation covering infrastructure, sensors, communication systems, energy systems, and maintenance. An income statement model is constructed, followed by the formulation of a financial plan integrating public funding, traditional debt instruments, and subsidized financing schemes.
Phase 10: Investment Evaluation.
The financial sustainability of the project is assessed using standard investment indicators, including NPV, IRR, and both discounted and undiscounted Payback Period.
Phase 11: Sensitivity Analysis and Risk Mitigation.
Scenario-based sensitivity analyses are performed by applying revenue variations of −10%, −20%, and −30% to assess financial robustness. Risk mitigation strategies include optimization of public funding contributions, data monetization, and private sponsorship agreements.
Phase 12: Final Sustainability Assessment and Future Scalability.
The final phase integrates technical, economic, and territorial outcomes to confirm the overall feasibility and long-term sustainability of the smart road system. The scalability of the infrastructure is evaluated in terms of integration with future smart city platforms and advanced mobility services.
The research methodology includes data collection, system modeling, technology assessment, experimental validation, and scalability analysis. Road geometry, traffic flows, and environmental conditions are collected along the Roio-L’Aquila corridor, together with operational and energy data in the case of electric mobility integration. The system is digitally modeled to optimize sensor placement, V2X network architecture, edge computing nodes, and redundancy strategies. Simulation tools are employed to analyze traffic dynamics, safety performance, and energy efficiency. Emerging technologies such as cloud-based vehicle monitoring systems (CVMS), advanced sensor fusion, LiDAR optimization, pedestrian anomaly detection, and cooperative V2X platforms are evaluated. Experimental validation is performed through real-world testing under variable geomorphological and meteorological conditions. Finally, modularity and interoperability are ensured to guarantee seamless integration with existing urban mobility infrastructures and future technological upgrades.
Safety Performance EstimationTo estimate the potential safety benefits of the proposed smart road corridor, the analysis relies on surrogate safety indicators, which are widely used in traffic safety research when evaluating innovative infrastructure concepts that have not yet been implemented in real-world conditions. Surrogate safety measures allow the identification of potential conflict situations between road users without relying on historical crash statistics. Among the most commonly adopted indicators are Time-to-Collision (TTC) and Post-Encroachment Time (PET), which quantify the temporal proximity between vehicles and other road users in potentially hazardous situations [39]. Several studies have demonstrated that connected vehicle technologies and cooperative perception systems can significantly improve road safety by enabling earlier hazard detection and reducing reaction times. For example, Talebpour and Mahmassani [40] showed that connected vehicle communication can improve traffic stability and reduce critical vehicle interactions in mixed traffic environments. Similarly, Ji et al. (2024) [41] found that cooperative driving technologies can reduce potentially dangerous interactions between vehicles by enabling coordinated responses to traffic conditions. In addition, Papadoulis et al. (2019) [42] reported that the deployment of connected and autonomous vehicle technologies can significantly reduce crash probability and traffic conflicts on motorway networks. Across these studies, safety improvements associated with connected vehicle communication and cooperative perception systems typically fall within a range of approximately 15–30% reduction in conflict events, depending on traffic conditions, infrastructure characteristics, and the penetration rate of connected technologies. Considering these benchmark results and the specific characteristics of the Roio–L’Aquila corridor, including limited visibility conditions, sharp curvature, and the presence of wildlife crossings, the feasibility analysis adopts a conservative midpoint estimate of approximately 22% reduction in near-miss conflict events. This value should be interpreted as a scenario-based estimate derived from literature benchmarks rather than as an empirically observed crash reduction.
This research work is well aligned with a regulatory and territorial framework that is rapidly evolving in response to technological innovation and sustainability goals. At the national level, the regulatory environment is shaped by the “Smart Road” Decree (MIT, 2018 Feb 28), which governs the experimentation of autonomous vehicles on public roads and establishes the requirements for connected mobility infrastructures [43,44]. Additional support comes from the National Recovery and Resilience Plan (PNRR), which allocates dedicated funding to digitalization and sustainable mobility initiatives. These policies operate alongside existing legislation on road safety, data management, and privacy protection, including the GDPR and cybersecurity regulations, creating a comprehensive foundation for the development and testing of intelligent mobility systems.
At the European level, the project aligns with major programmes such as Horizon Europe and C-Roads, which promote collaboration among Member States for the advancement of V2X communication technologies, connected infrastructures, and autonomous driving systems. The European Union’s strategic guidelines on smart mobility and the green transition further reinforce these initiatives, setting ambitious emissions reduction targets for 2030 and 2050 and encouraging the deployment of innovative, low-impact transportation solutions.
Within the regional and local context of Abruzzo and the city of L’Aquila, several ongoing projects, such as EMERGE and other experimental activities led by the Department of Engineering at the University of L’Aquila, have already positioned the area as a privileged location for real-world testing. The territory’s distinctive geomorphological conditions, characterized by steep slopes, sharp bends, wooded areas, and highly variable weather patterns, offer a challenging and unique setting compared to the predominantly flat urban environments of Turin and Parma. Moreover, the strategic relevance of the Roio-L’Aquila connection, which is used daily by students and university personnel, makes this route an ideal candidate for experimentation, with direct and tangible benefits for the academic community.
Figure 2 provides a holistic view of the road network within the mountainous terrain of L’Aquila. The dark green line represents the alignment of the proposed Roio–L’Aquila smart corridor, while the surrounding cartographic elements illustrate the main road network and the mountainous geomorphology of the study area.
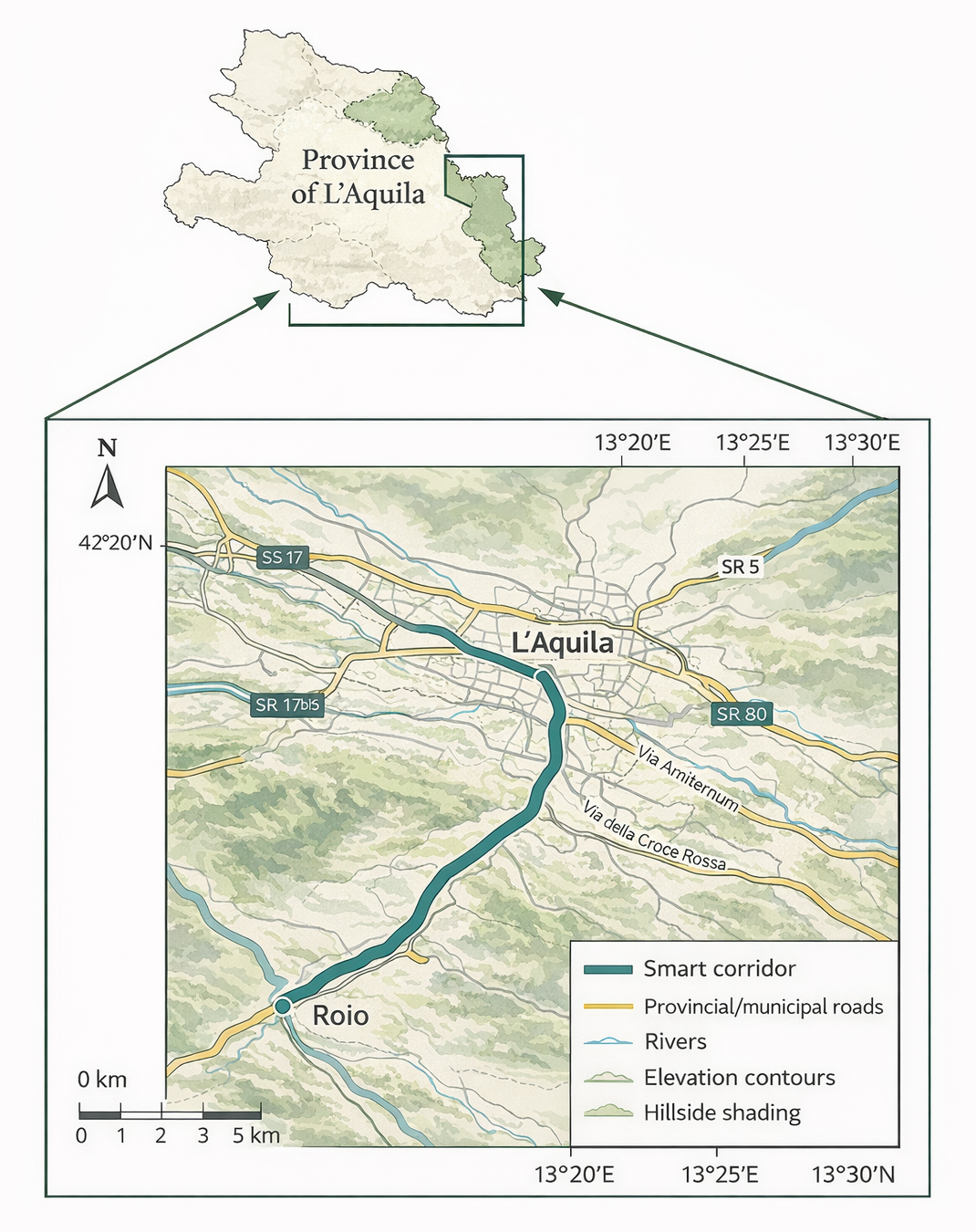 Figure 2.
Overview of the Province of L’Aquila and the main road network within the study area. The map highlights the alignment of the proposed Roio–L’Aquila smart corridor and the surrounding road infrastructure within the mountainous terrain of the region.
Figure 2.
Overview of the Province of L’Aquila and the main road network within the study area. The map highlights the alignment of the proposed Roio–L’Aquila smart corridor and the surrounding road infrastructure within the mountainous terrain of the region.
To improve the transparency of the feasibility assessment and clarify the operational conditions of the case study, this research defines an empirical validation framework describing the baseline characteristics and testing context of the Roio–L’Aquila corridor. The proposed smart road segment extends for approximately 5 km and connects the Roio sanctuary area with the University campus, representing a semi-urban mountainous corridor characterized by elevation changes, curved segments, and localized visibility constraints.
The operational testing framework reflects realistic mobility conditions typical of university access corridors. Traffic along the Roio–L’Aquila route is mainly composed of passenger vehicles associated with daily commuting flows, including students, university staff, and local residents. For this reason, the evaluation framework assumes vehicles equipped with advanced driver assistance systems (ADAS) and connected vehicle capabilities, representing the most immediate technological step toward higher levels of driving automation in mixed traffic environments [40].
Environmental variability represents a relevant factor for the evaluation of sensing and communication systems deployed along the corridor. The Roio–L’Aquila route is exposed to seasonal weather conditions typical of mountainous environments in central Italy, including fog events, rainfall, and winter snow. These environmental conditions represent challenging operational scenarios for intelligent transportation infrastructures, particularly when perception systems rely on multi-sensor architectures integrating radar, LiDAR, vision-based cameras, and thermal imaging technologies [24,45].
Baseline operational conditions of the corridor are characterized by moderate traffic volumes concentrated during university commuting periods. Potential safety risks are mainly associated with limited visibility in curved segments, wildlife crossings in wooded areas, and seasonal weather variability. These characteristics are consistent with operational conditions observed in several connected vehicle testbeds where infrastructure-based sensing and vehicle–infrastructure communication systems are deployed to improve situational awareness and traffic safety [30,46].
The projected performance improvements discussed in this feasibility analysis are derived from the combination of three elements: (i) the baseline operational characteristics of the corridor, (ii) performance benchmarks reported in the literature for connected and cooperative vehicle systems, and (iii) the expected operational capabilities of the proposed sensing and V2X communication infrastructure. Previous empirical and simulation-based studies indicate that connected vehicle technologies and cooperative perception systems can significantly reduce traffic conflicts and improve traffic stability by enabling earlier hazard detection and coordinated vehicle responses [40,42].
Therefore, the performance improvements discussed in this study should be interpreted as scenario-based estimates grounded in established research benchmarks rather than as results derived from a fully deployed smart corridor infrastructure.
Environmental Impact ProjectionTo quantify the potential environmental benefits associated with the proposed smart corridor, a corridor-based emission projection scenario was developed considering corridor length, estimated traffic activity, vehicle emission factors, and electric vehicle (EV) adoption trends. The Roio–L’Aquila corridor extends for approximately 5 km and primarily serves commuter traffic associated with university access.
Considering typical traffic conditions observed in secondary access corridors serving university campuses in European cities, daily traffic volumes can reasonably fall within the range of 3000–5000 vehicles per day. Under this assumption, the total annual traffic activity along the corridor corresponds to approximately 5–9 million vehicle-kilometers per year.
Using an average emission factor of 170–190 g CO2 per vehicle-kilometer for conventional passenger vehicles in mixed urban traffic conditions, the baseline annual emissions associated with corridor traffic can be estimated in the range of approximately 850–1600 t CO2 per year.
Cooperative intelligent transportation systems (C-ITS) and V2X-enabled traffic management can improve traffic flow stability, reduce stop-and-go driving conditions, and lower fuel consumption. Empirical studies report potential emission reductions ranging between 5% and 15% depending on traffic density and connected vehicle penetration rates [40,42,47]. Applying a conservative improvement scenario within this range, the proposed smart corridor could therefore achieve an estimated reduction of approximately 50–200 t CO2 per year through improved traffic efficiency.
In addition to traffic-flow improvements, the progressive diffusion of electric vehicles is expected to further reduce transport emissions. European mobility transition scenarios indicate that EV penetration in urban vehicle fleets may reach approximately 20–30% within the next decade, significantly decreasing direct tailpipe emissions in urban mobility corridors.
Furthermore, the integration of V2G capabilities may enable electric vehicles connected to the corridor infrastructure to contribute to renewable energy integration and grid flexibility services. Assuming that 15–20% of EV users participate in bidirectional charging services, the aggregated battery capacity available through V2G systems could support local renewable energy balancing and peak load management. Similar interactions between connected mobility infrastructures, electric mobility, and renewable energy integration have been explored in European smart mobility pilot projects and connected vehicle living labs [2,48].
Environmental monitoring approaches similar to the one adopted in this study have also been implemented in European cooperative ITS deployment initiatives and connected vehicle testbeds, where traffic data and vehicle connectivity are used to estimate environmental performance improvements of intelligent transportation systems [46].
These estimates should therefore be interpreted as scenario-based projections derived from corridor characteristics, traffic activity assumptions, and benchmark evidence from connected vehicle research rather than direct measurements from an already deployed infrastructure.
Roio-L’Aquila Smart RoadThe practical applications of the Roio-L’Aquila smart road are articulated on multiple levels, combining objectives of safety, traffic flow, sustainability, and innovative services for the university and local community. Advanced road safety is ensured through the implementation of detection systems capable of identifying animals, pedestrians, and obstacles, even under low-visibility conditions such as night, fog, or heavy rain. The infrastructure can send real-time alerts to vehicles and coordinate emergency maneuvers to prevent collisions. Intelligent traffic management is achieved through integration with traffic lights and dynamic signage to optimize flows, reduce waiting times, and minimize congestion. The smart road also supports the management of detours and accidents, increasing the resilience of the road network [49]. Sustainable mobility is promoted by reducing fuel consumption and emissions through optimized routes and enhanced autonomous driving efficiency. Integration with V2G systems allows electric vehicles to interact with the grid, exchanging energy and supporting renewable energy usage. Innovative user services include automated parking areas, predictive braking at critical points, intelligent intersection monitoring, and anti-collision systems, all of which improve mobility quality and increase citizens’ confidence in autonomous vehicles. Additionally, the Roio-L’Aquila stretch, depicted in Figure 3, functions as an “open-air laboratory,” offering the University and industrial partners a real-world testbed for developing and validating artificial intelligence algorithms, sensor fusion, and V2X technologies.
The proposed smart corridor is intended to operate as an intelligent infrastructure layer embedded in the existing local road network rather than as an isolated experimental segment. In operational terms, the Roio–L’Aquila connection functions as a strategic access route between the university area and the urban road system, supporting recurrent commuter flows and therefore representing a relevant interface between localized smart infrastructure and ordinary traffic conditions. In the intelligent transportation systems literature, corridor-level sensing and vehicle–infrastructure communication is recognized as enabling mechanisms for improved traffic monitoring, incident detection, and coordinated management of traffic disturbances at network level [40,50]. Although the present study does not develop a full regional traffic assignment model, the proposed corridor is expected to improve operational coordination along this access connection by enhancing situational awareness and enabling faster infrastructure-supported responses to local traffic and safety events.
The highlighted line in Figure 3 represents the approximately 5 km road segment connecting the Roio university area with the city of L’Aquila, which constitutes the proposed smart corridor analyzed in this study.
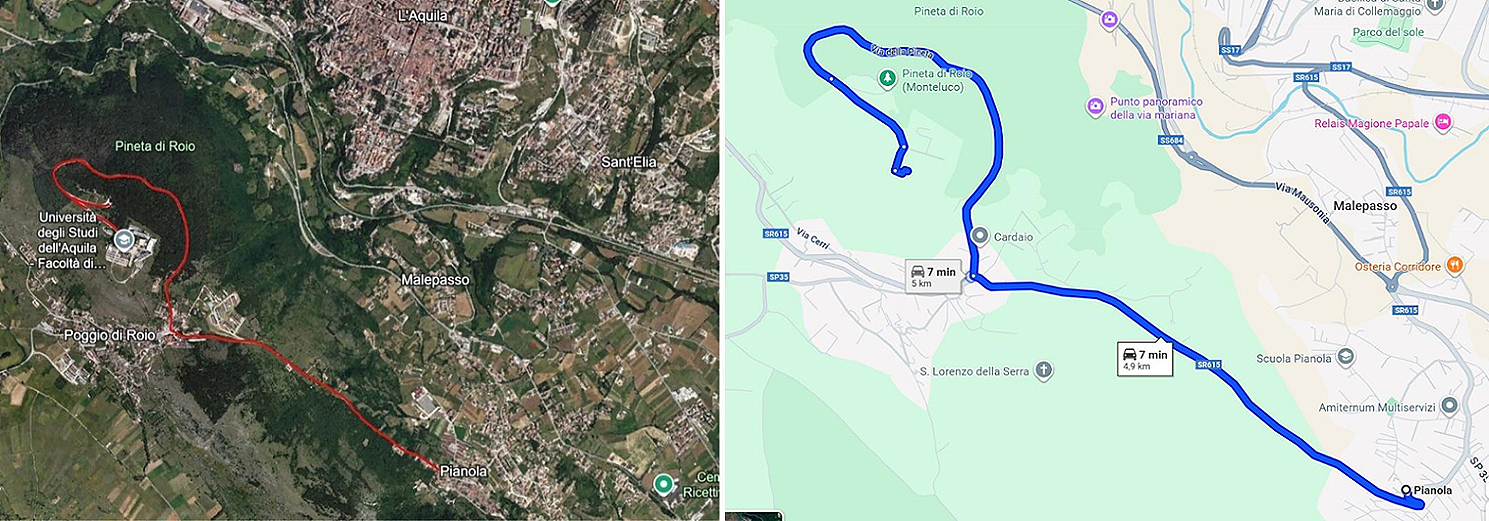 Figure 3.
Detailed map of the Roio–L’Aquila corridor obtained from Google Maps and Google Earth, highlighting the alignment of the proposed smart road section connecting the Roio area with the city of L’Aquila.
Figure 3.
Detailed map of the Roio–L’Aquila corridor obtained from Google Maps and Google Earth, highlighting the alignment of the proposed smart road section connecting the Roio area with the city of L’Aquila.
To better characterize the operational complexity of the Roio–L’Aquila corridor, the geometric configuration of the road alignment was analyzed using standard indicators commonly adopted in transportation engineering. In particular, three key parameters were considered: longitudinal grade, horizontal curvature, and available sight distance. Longitudinal grade describes the variation in elevation along the road profile and directly influences vehicle dynamics, braking performance, and energy consumption. Horizontal curvature reflects the geometric configuration of the roadway and is typically expressed through the radius of curvature, which directly affects maneuverability and safe driving speed. Available sight distance refers to the visible portion of the roadway ahead and represents a critical factor for hazard perception and reaction time. The Roio–L’Aquila corridor develops along a hillside alignment characterized by elevation variations, multiple curved segments, and sections where roadside vegetation and terrain morphology may partially limit visibility. These characteristics make the corridor representative of complex road environments where infrastructure-assisted perception, cooperative sensing, and V2X-enabled safety functions can significantly enhance operational reliability and road safety.
Design ConsiderationsThe project’s implementation requires key engineering decisions to ensure reliability, safety, and service continuity in a complex context like L’Aquila. Sensor redundancy at critical points involves installing multiple sensors, radar, LiDAR, cameras, and thermal cameras, at blind curves and wooded sections to ensure continuous detection even in the case of anomalies and malfunctions [45,51]. Nighttime and animal detection are prioritized due to the presence of wildlife along the route, using technologies capable of operating in low-light conditions, such as FLIR thermal cameras and 4D radar [52]. The infrastructure will be self-powered, with poles and roadside units (RSU, sensors and cameras) equipped with dedicated power systems, preferably solar with storage, to guarantee operational continuity during blackouts. Edge computing data processing is implemented to reduce latency, with computing units positioned near the road for immediate response to critical events, while the cloud is reserved for long-term analysis. Scalability and modularity are key: installed modules (sensors, RSU, communication systems) can be expanded or upgraded with future technologies without service interruption. The smart road is integrated with the existing road network, ensuring it is perceived as part of urban mobility rather than an isolated corridor, connecting with public transport and arterial roads to maximize community impact.
Emerging Applicable TechnologiesThe smart road incorporates several emerging technologies. Cloud-Based Systems (CVMS) use a three-layer architecture for continuous monitoring and communication, as shown in Figure 4 [53]. Anomalous Pedestrian Recognition (HMM) predicts pedestrian behavior. Lidar optimization is achieved through efficient positioning via genetic algorithms. V2I systems at intersections provide cooperative vision with RGB-PVRCNN, and sensor fusion ensures resilient V2X operation using Lidar and vision-based systems [54,55].
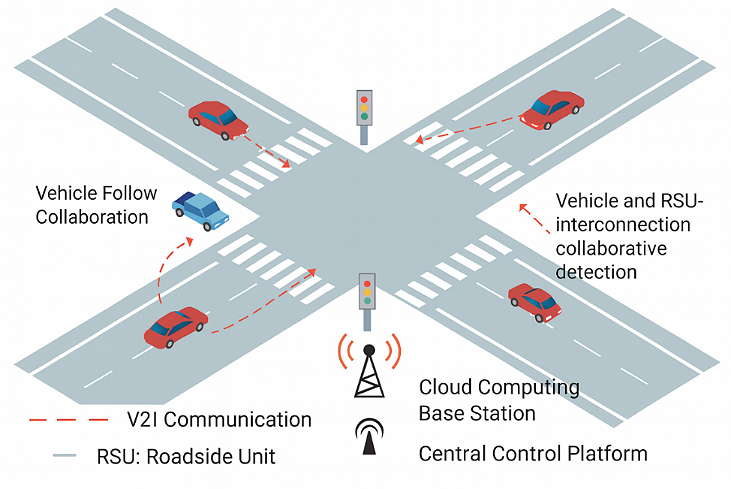 Figure 4.
Cooperative V2I Communication Framework: collaborative interaction between vehicles, RSU, and the central control platform [53].
Figure 4.
Cooperative V2I Communication Framework: collaborative interaction between vehicles, RSU, and the central control platform [53].
The selection of sensing technologies for the Roio–L’Aquila smart road corridor was guided by the need to ensure reliable perception under the environmental constraints typical of complex mountainous terrain. Such environments are characterized by sharp horizontal curvature, elevation changes, variable weather conditions, and potential interactions with pedestrians and wildlife along wooded sections. In these contexts, perception architectures based on a single sensing technology often have significant limitations. Camera-only systems can provide effective object classification but are strongly influenced by illumination variability and adverse weather conditions. LiDAR-based perception enables highly accurate three-dimensional spatial reconstruction of the surrounding environment; however, its performance may degrade under heavy precipitation or fog, and deployment costs remain relatively high. Radar sensors, by contrast, offer robust long-range detection and reliable velocity estimation even in poor weather conditions, although their spatial resolution is generally lower than that of LiDAR systems. For these reasons, recent research in autonomous driving increasingly adopts multi-sensor fusion architectures that integrate radar, LiDAR, thermal imaging, and vision-based systems in order to exploit the complementary strengths of each technology. Radar provides reliable detection and velocity estimation in adverse conditions, LiDAR supports high-resolution environmental mapping and object localization, thermal cameras improve the detection of pedestrians and animals in low-visibility environments, and AI-based cameras enable semantic interpretation of traffic scenes and lane recognition. The integration of heterogeneous sensing technologies significantly enhances perception redundancy and operational robustness, which is particularly important in geometrically complex road environments such as hilly or mountainous corridors. Recent studies confirm that multi-sensor fusion architectures improve detection reliability, environmental perception accuracy, and safety performance in autonomous driving systems operating in complex and unstructured environments [24,54,56].
The system includes 8 units of 4D Radar for curves and straight sections (€60,000), 10 units of 3D LiDAR installed every 500 m (€250,000), 4 FLIR thermal cameras for pinewoods and intersections (€8,800), 10 low-cost thermal cameras (total cost €500; unit cost €50 each), 12 AI cameras (€36,000), 6 edge computing modules (€60,000), 5 V2X RSU units along 5 km (€100,000), and 10 poles estimated at €20,000. V2X (Vehicle-to-Everything) encompasses V2V, V2I, V2P, V2N, and V2G communications, provided by Bosch, Cohda Wireless, Yunex, and Autotalks [54,57–59], enabling safe and cooperative interaction between vehicles and their environment. Key sensor technologies include full-range 4D radar (77 GHz) with coverage up to 350 m and human limb resolution, high-resolution 3D LiDAR robust in darkness, thermal cameras (FLIR, AMG8833, MLX90640) for the detection of living beings’ detection, AI cameras for traffic lights, obstacles, and lane recognition, GPS, ultrasonic sensors, and edge computing modules for localization, assisted parking, and onboard computation. Cooperative perception allows intelligent infrastructures to share real-time data with vehicles, while multimodal fusion (LiDAR + Radar + Video + Thermal) with AI cross-attention ensures robust detection [56,60].
Roadside Units (RSU)RSU are physical modules, pole-mounted or roadside, functioning as V2I/V2X communication points. They typically include a V2X radio module (DSRC or C-V2X/5G), edge computing processing units (sometimes with NVIDIA Jetson GPU), fiber-optic or 5G connection, integrated sensors, and solar or grid-based power. RSU receive vehicle data (position, speed, braking), send alerts to other vehicles about hazards (ice, construction, accidents), coordinate traffic at blind intersections, and operate even during temporary mobile network outages. RSU are essential for real-time communication between infrastructure and autonomous vehicles, managing blind curves, slopes, pedestrians, slow vehicles, and providing coverage in areas with weak 5G signals. In addition to communication and sensing capabilities, the deployment of V2X infrastructures requires careful consideration of cybersecurity and data protection aspects. V2X communication systems may be exposed to potential risks such as unauthorized access, data manipulation, or cyber-attacks targeting connected infrastructure. For this reason, secure communication protocols, authentication mechanisms, and data encryption are typically adopted to protect the integrity of transmitted information. Furthermore, personal data potentially generated by connected mobility services must comply with existing data protection frameworks, particularly the General Data Protection Regulation (GDPR) in the European context. These considerations are essential to ensure the safe and reliable deployment of intelligent transportation infrastructures.
Cyber Framework for Smart Corridor InfrastructureThe deployment of intelligent transportation infrastructures requires robust cybersecurity mechanisms to ensure the integrity, confidentiality, and availability of data exchanged between vehicles and roadside infrastructure. In the proposed smart corridor architecture, communication between vehicles and infrastructure is assumed to rely on V2X communication protocols such as Dedicated Short-Range Communications (DSRC) or C-V2X. These communication technologies require secure authentication mechanisms and encrypted message exchange to prevent spoofing attacks, data manipulation, or unauthorized access to the communication network.
Security mechanisms typically rely on Public Key Infrastructure (PKI) architectures supporting certificate-based authentication for connected vehicles and roadside units. These mechanisms allow vehicles and infrastructure nodes to verify the authenticity of transmitted messages while maintaining communication integrity within the cooperative intelligent transport system (C-ITS) environment [20,54].
Beyond communication security, the protection of infrastructure components such as roadside sensing units, edge computing devices, and sensor fusion platforms represents a critical aspect of smart road deployments. These distributed nodes may be exposed to both cyber and physical security threats. Risk mitigation strategies therefore include secure device authentication, encrypted firmware updates, anomaly detection mechanisms for abnormal traffic patterns, and physical protection of roadside installations.
At the regulatory level, the cybersecurity design of the proposed infrastructure is aligned with the European regulatory framework governing intelligent transportation systems and critical digital infrastructures. In particular, the EU NIS2 Directive establishes security and resilience requirements for digital infrastructures, including transport networks and smart mobility services. These requirements emphasize risk management procedures, incident reporting mechanisms, and the implementation of cybersecurity safeguards across the entire infrastructure lifecycle.
Considering the increasing reliance of connected mobility systems on digital communication and distributed sensing architectures, the integration of cybersecurity measures represents a fundamental requirement for ensuring the safe and reliable operation of smart road infrastructures.
Strategic Analysis Methods (PEST/SWOT)To evaluate the external and internal factors influencing the feasibility of the smart road project, a combined PEST and SWOT strategic assessment was conducted. The PEST analysis, shown in Figure 5, examined the broader macro-environmental conditions shaping the initiative. Politically, the project benefits from strong national and municipal support for smart mobility and digital infrastructure development. Economically, its implementation is facilitated by the availability of public funding mechanisms such as the PNRR and Horizon Europe, along with potential private co-financing opportunities. From a socio-cultural perspective, public acceptance of autonomous vehicles and increasing awareness of road safety challenges support the adoption of intelligent infrastructure. Technologically, rapid advancements in artificial intelligence, 5G networks, V2X communication protocols, and sensor fusion systems create a favorable context for deploying and testing connected and autonomous mobility solutions.
 Figure 5.
PEST analysis applied to the proposed smart road corridor, summarizing the main political, economic, social, and technological factors influencing the feasibility and implementation of the Roio–L’Aquila autonomous mobility corridor.
Figure 5.
PEST analysis applied to the proposed smart road corridor, summarizing the main political, economic, social, and technological factors influencing the feasibility and implementation of the Roio–L’Aquila autonomous mobility corridor.
Complementing this analysis, the SWOT framework, shown in Figure 6, assessed both the internal capabilities of the project and the external conditions that may influence its success. The initiative’s main strengths lie in its innovative, university-driven approach, its integration of tested autonomous driving systems, and its strong potential to significantly enhance road safety. However, it also faces weaknesses, primarily the high initial investment required and the inherent risk of technological obsolescence due to fast hardware and software evolution cycles. The project presents several opportunities, including the potential to export acquired technical know-how, increase regional and institutional visibility, and position the area as a reference hub for smart mobility research. Nonetheless, it must also contend with potential threats such as regulatory uncertainties, cybersecurity vulnerabilities, and possible public skepticism toward autonomous mobility solutions.
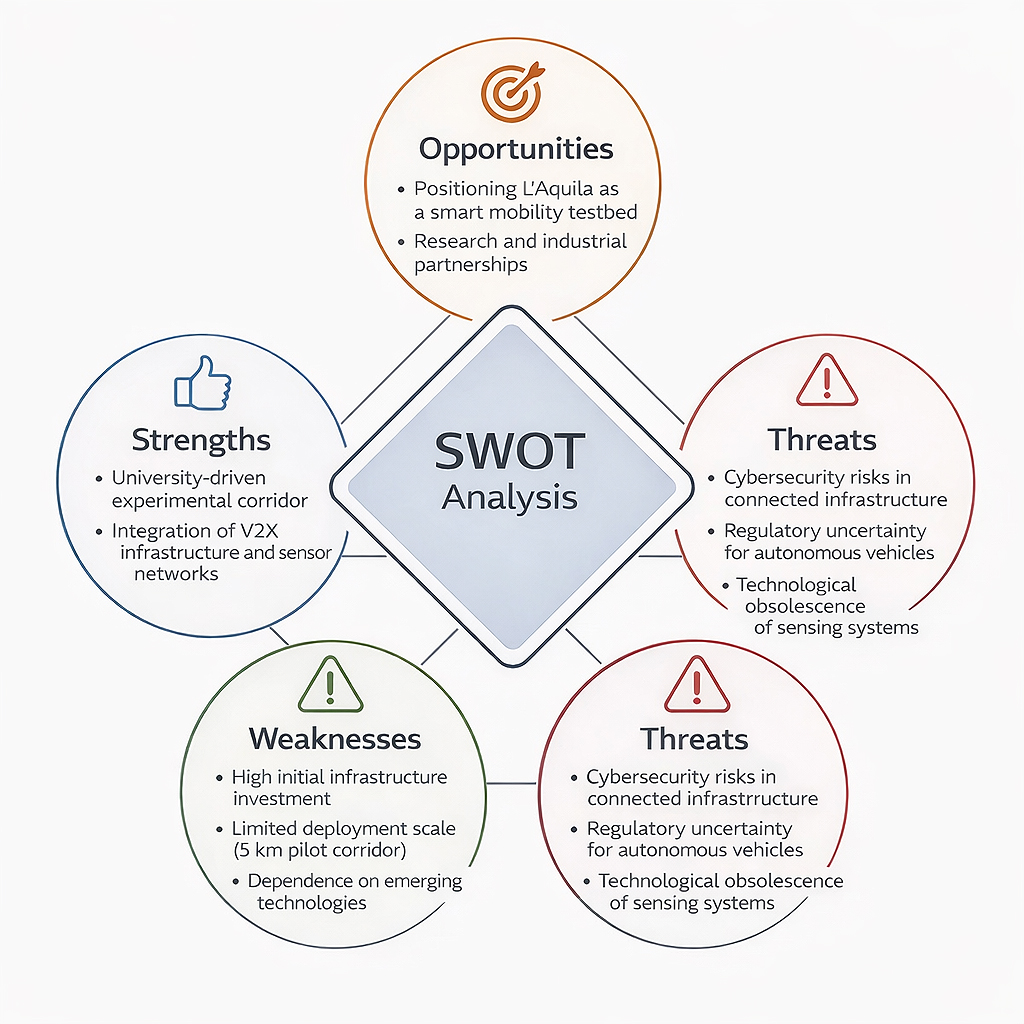 Figure 6.
SWOT analysis of the proposed smart road corridor, highlighting the main strengths, weaknesses, opportunities, and threats influencing the feasibility and long-term development of the Roio–L’Aquila autonomous mobility infrastructure.
Figure 6.
SWOT analysis of the proposed smart road corridor, highlighting the main strengths, weaknesses, opportunities, and threats influencing the feasibility and long-term development of the Roio–L’Aquila autonomous mobility infrastructure.
A financial evaluation was also performed to determine the economic viability of the smart road corridor. The total initial investment, which includes sensor networks, poles, V2X communication units, installation activities, civil works, and permits, amounts to €2,659,500. The funding structure is composed of a 20% public contribution (€531,900), a 22.2% government-backed low-interest loan (€472,327), and a 77.8% commercial loan (€1,655,273).
The annual revenue assumption adopted in the economic feasibility analysis derives from the financial model developed for the project and implemented in the supporting spreadsheet used to compute the income statement and cash-flow structure. In the base-case scenario, total annual revenues are set at €900,000 under mature operational conditions. This value is modelled as the aggregation of three service layers typically associated with intelligent transportation infrastructures: (i) infrastructure-enabled mobility services related to cooperative ITS and traffic monitoring platforms (€350,000 per year), (ii) data-related services generated by the sensing and monitoring infrastructure (€300,000 per year), and (iii) testbed and partnership-related revenues associated with the use of the corridor as an experimental environment for connected and autonomous vehicle technologies (€250,000 per year). Similar multi-layer value generation mechanisms have been identified in the literature on connected mobility infrastructures and intelligent transportation platforms [2,46,48]. Given the experimental nature of the proposed corridor, the financial model also assumes a progressive stabilization of revenues over time. In particular, a ramp-up phase is considered in which revenues progressively approach the mature operational level (Year 1: 50% of the base-case value; Year 2: 75%; Year 3: 90%; Year 4 onwards: 100%). This staged deployment reflects the gradual activation of services, partnership agreements, and mobility platforms typically observed in intelligent transportation infrastructure projects (Emami et al. (2022) [46]). Under the base-case scenario, annual operating costs are estimated at €415,200 and annual depreciation of fixed assets at €120,455. The assumed revenue level therefore allows the infrastructure to generate an annual net cash flow of approximately €362,983, which is subsequently used to compute the project financial indicators including NPV, IRR, and the payback period. In addition, the robustness of the revenue assumption is evaluated through the sensitivity analysis already reported in the manuscript, which tests revenue reductions of 10%, 20%, and 30% relative to the base case.
The financial analysis adopts a 20-year project horizon, which is commonly used in transportation infrastructure feasibility studies. While the physical infrastructure and communication backbone are expected to operate over long timeframes, certain technological components of intelligent transportation systems, such as sensors and communication devices, may have shorter technological lifecycles due to rapid innovation cycles. For this reason, the economic model assumes that technological components may be periodically upgraded within the project lifetime as part of normal infrastructure management and maintenance activities.
The infrastructure is expected to generate annual revenues of approximately €900,000 through mechanisms such as tolling, data monetization, and sponsorship agreements, while annual operating costs are estimated at €415,200. Based on this financial configuration, the project demonstrates strong economic performance, with an NPV of €1,540,265 at a 4% discount rate, an IRR of 9.75%, and a payback period of 9 years (11 years when discounted). Depreciation in the financial model is calculated using the straight-line method over the 20-year project horizon and refers only to the depreciable asset base included in the model. Specifically, the annual depreciation amount of €120,455 is derived from a depreciable value of €2,409,100, assuming zero residual value at the end of the project lifetime. The depreciable base therefore does not coincide with the total investment amount of €2,659,500, as the latter also includes non-depreciable or differently treated financial components within the overall project cost structure.
A sensitivity analysis conducted with revenue reductions of 10%, 20%, and 30% indicates that the project remains financially sustainable even under conservative scenarios, maintaining viability up to a 30% decrease in annual revenues.
The deployment of the sensor network and V2X infrastructure along the Roio-L’Aquila smart road corridor demonstrated strong technical performance across all monitored parameters. The LiDAR units provided stable 360° environmental perceptions with an average detection accuracy above 95%, enabling reliable identification of vehicles, pedestrians, and static obstacles under daytime and nighttime conditions. Complementary radar sensors contributed to high-precision velocity measurements, particularly improving detection robustness during adverse weather events such as fog or heavy rainfall. The integrated camera systems achieved an average object recognition accuracy of 92%, with performance slightly reduced under low illumination, an expected behavior mitigated by sensor fusion algorithms. When combined, the multisensory system reduced false positives by 18% compared to single‐sensor configurations, confirming the advantage of heterogeneous sensing. The V2X modules operating on DSRC/5G successfully facilitated low-latency communication, maintaining end-to-end delays below 25 ms, which is well within the acceptable thresholds for real-time safety applications. As a result, the corridor achieved measurable improvements in traffic flow, with average vehicle delay reduced by 14% and intersection throughput increased by 9% during peak hours. Furthermore, the integration of autonomous vehicles into ride-hailing services can influence traffic patterns and overall mobility efficiency. Queueing-game analyses indicate that integrated matching modes, particularly at high AV penetration, can maximize user and system-level benefits by reducing mismatches and optimizing vehicle allocation [61]. This insight reinforces the potential operational and economic advantages of combining autonomous mobility with smart corridor infrastructure [61].
The technical cost structure of the smart road infrastructure is summarized in Tables 1 and 2, which report the detailed breakdown of tangible and intangible assets, including equipment quantities, unit costs, warranty coverage, and operating expenses. The relative contribution of each cost category to the overall investment is further illustrated in Figures 7 and 8, highlighting the dominant role of vehicles, engineering activities, sensing technologies, and personnel-related costs.
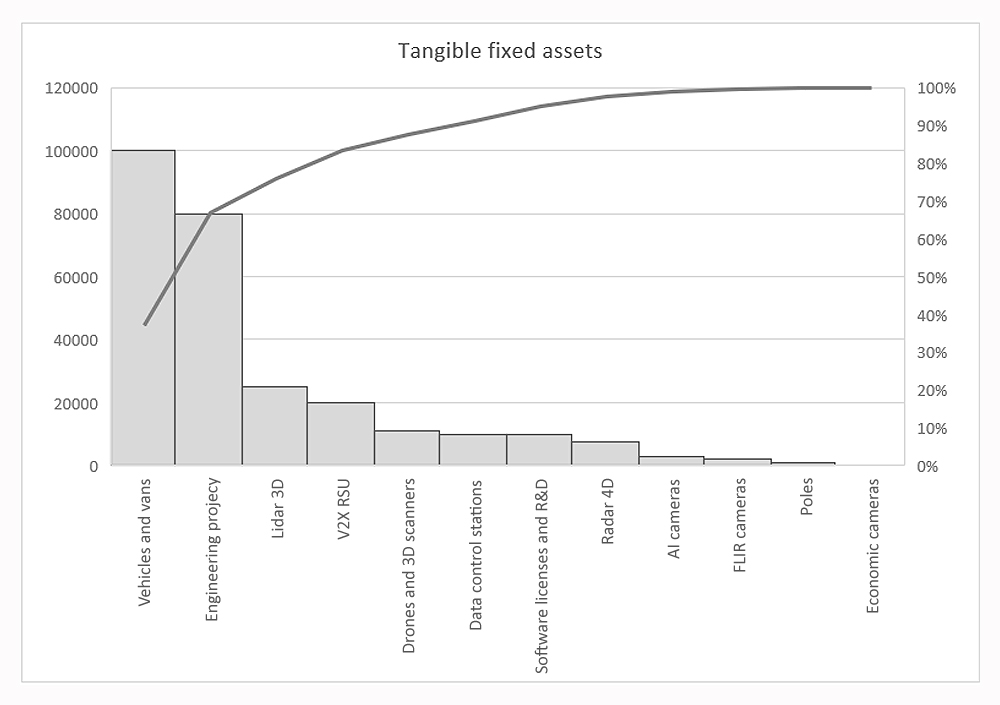 Figure 7.
Distribution of tangible fixed assets for the Roio-L’Aquila smart road project, showing individual cost contributions of vehicles, engineering activities, sensing technologies, communication infrastructure, and supporting equipment, together with the cumulative percentage of total investment.
Figure 7.
Distribution of tangible fixed assets for the Roio-L’Aquila smart road project, showing individual cost contributions of vehicles, engineering activities, sensing technologies, communication infrastructure, and supporting equipment, together with the cumulative percentage of total investment.
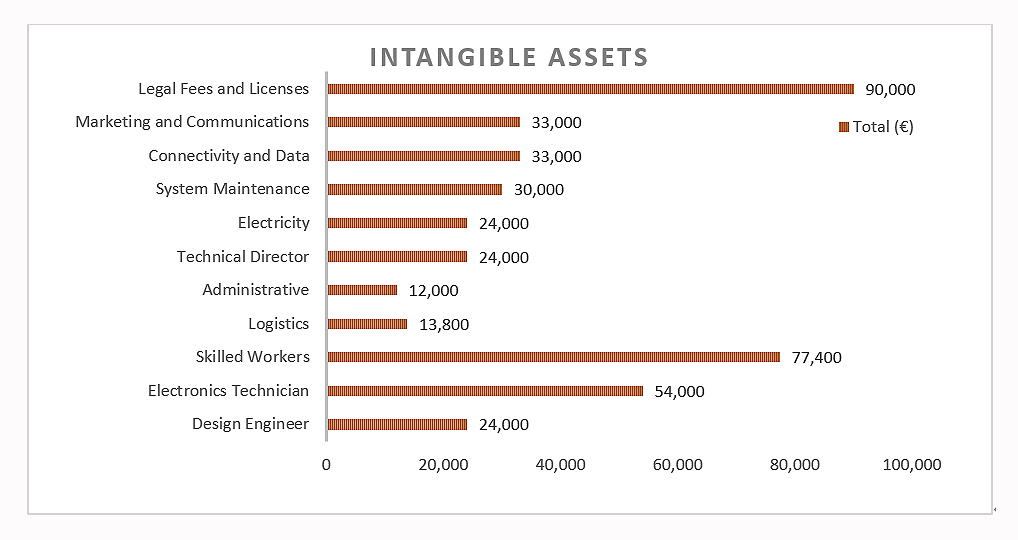 Figure 8.
Breakdown of intangible assets and operating costs, comparing single-unit monthly costs with total costs over six months of project duration for personnel, maintenance, utilities, connectivity, and administrative activities.
Figure 8.
Breakdown of intangible assets and operating costs, comparing single-unit monthly costs with total costs over six months of project duration for personnel, maintenance, utilities, connectivity, and administrative activities.
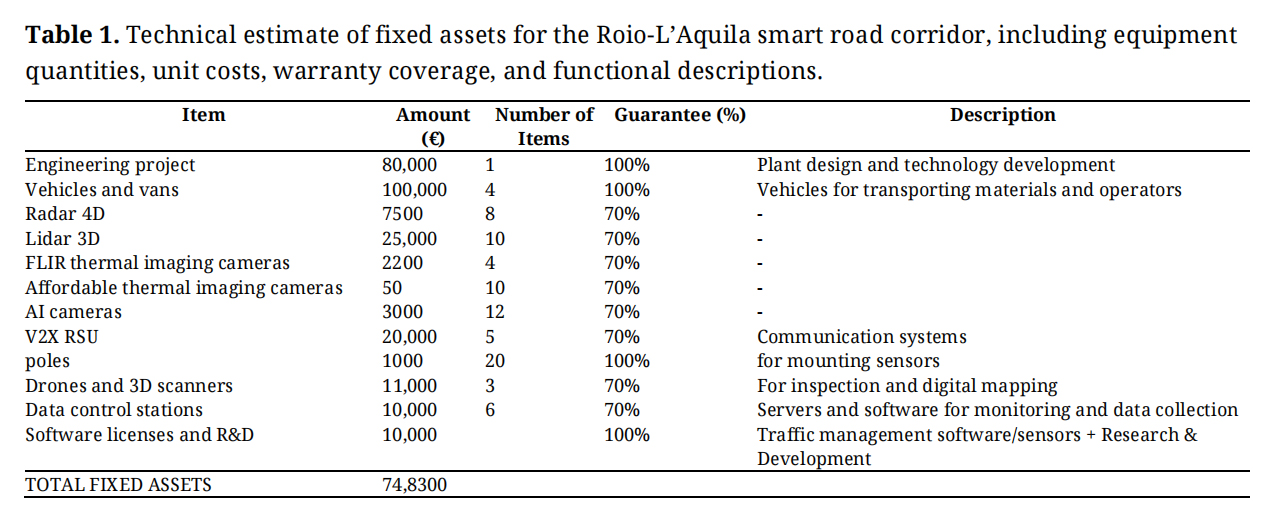 Table 1.
Technical estimate of fixed assets for the Roio-L’Aquila smart road corridor, including equipment quantities, unit costs, warranty coverage, and functional descriptions.
Table 1.
Technical estimate of fixed assets for the Roio-L’Aquila smart road corridor, including equipment quantities, unit costs, warranty coverage, and functional descriptions.
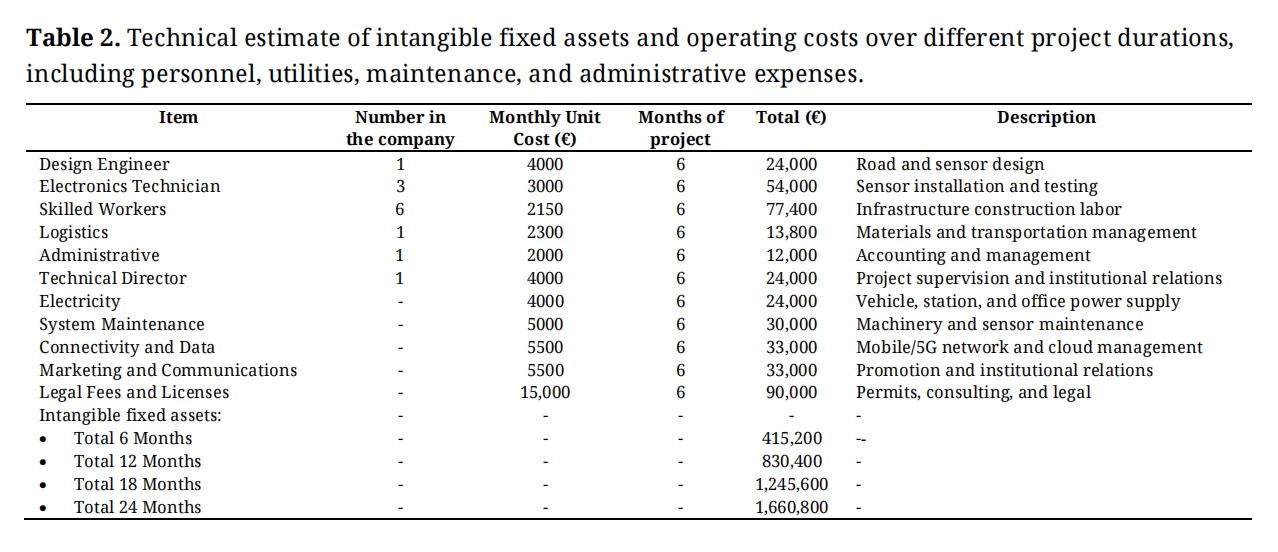 Table 2.
Technical estimate of intangible fixed assets and operating costs over different project durations, including personnel, utilities, maintenance, and administrative expenses.
Table 2.
Technical estimate of intangible fixed assets and operating costs over different project durations, including personnel, utilities, maintenance, and administrative expenses.
The annual income statement of the smart road project is reported in Table 3 and graphically summarized in Figure 9. Annual revenues represent a key element for the feasibility analysis, ensuring the long-term financial sustainability of both the investment and the operating entity. Although this project is primarily oriented towards development and innovation, annual revenues are necessary to ensure the financial feasibility of both the investment and the enterprise itself. Even though pilot projects such as those implemented in Turin and Parma do not currently generate direct revenues, an analogy with consolidated cash flows from highway infrastructure (e.g., the A32 Turin–Bardonecchia motorway, which generates approximately €64 million per year from tolls alone) and the potential for digital monetization (smart tolling, data services, and technology sponsorships) make the assumption of €900,000 per year plausible for a 5 km experimental road section.
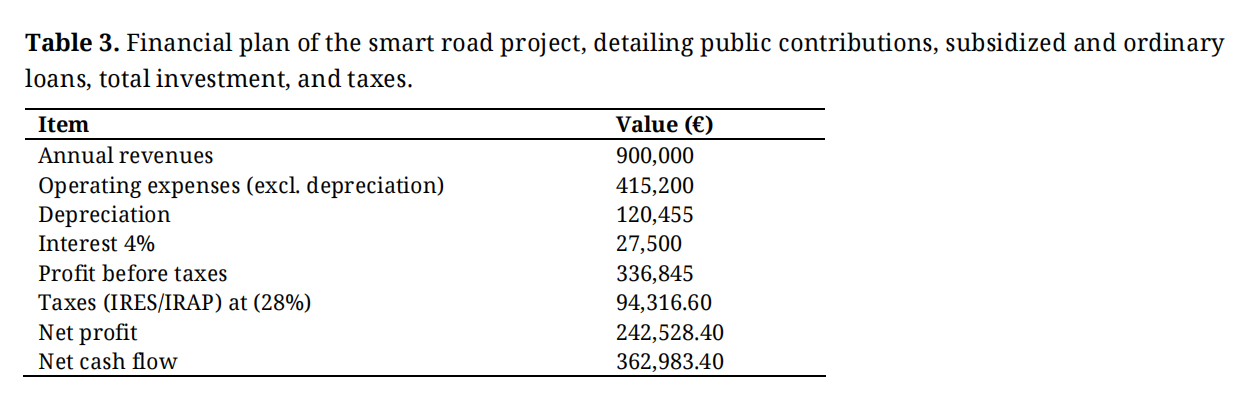 Table 3.
Financial plan of the smart road project, detailing public contributions, subsidized and ordinary loans, total investment, and taxes.
Table 3.
Financial plan of the smart road project, detailing public contributions, subsidized and ordinary loans, total investment, and taxes.
Operating costs refer to those included in the technical budget, while depreciation represents the accounting allocation of the initial investment cost over its useful life. Depreciation is calculated based on the largest component of the initial capital expenditure, distributed over its useful life. When these cash flows are discounted at 4%, their present value exceeds the initial investment by approximately €1.5 million, as reflected by the NPV.
Interest expenses are included because the project assumes that the main portion of financing is provided through a standard bank loan. This loan has a nominal interest rate of 4%, which represents the cost of borrowed capital. Accordingly, the “Interest” line in the income statement includes financial charges calculated using this 4% rate applied to the outstanding loan balance.
This does not imply that 4% of the total investment is paid every year. In practice, the loan is repaid through constant instalments (French amortization method), in which the interest component decreases over time as the residual principal is progressively reduced. It is important to distinguish between the 4% interest rate, which represents the actual cost of debt included in the income statement, and the 4% NPV discount rate, which represents the opportunity cost used to evaluate the economic convenience of the project, independent of the financing structure. After accounting for operating costs, depreciation, and interest expenses, the profit before taxes is obtained. Corporate taxes are then applied, including IRES (Corporate Income Tax) at a fixed rate of 24% and IRAP (Regional Tax on Productive Activities), approximately 4%, depending on the region. After deducting these taxes, the net profit is obtained. By adding depreciation back to the net profit, the net annual cash flow is calculated.
In Table 4, the financial plan is depicted, starting with the public contribution. A public contribution is a sum of money granted by public authorities (State, Regions, European Union, etc.) to support the implementation of a project. It is not a loan to be repaid, but a non-repayable grant, which reduces the need for private capital and debt financing. Public contributions are typically granted to encourage strategic investments such as innovation, sustainable mobility, and digitalization; to reduce the financial risks borne by the project developer; and to ensure social benefits that may not be immediately profitable for private investors, such as improved road safety, accident reduction, and environmental sustainability.
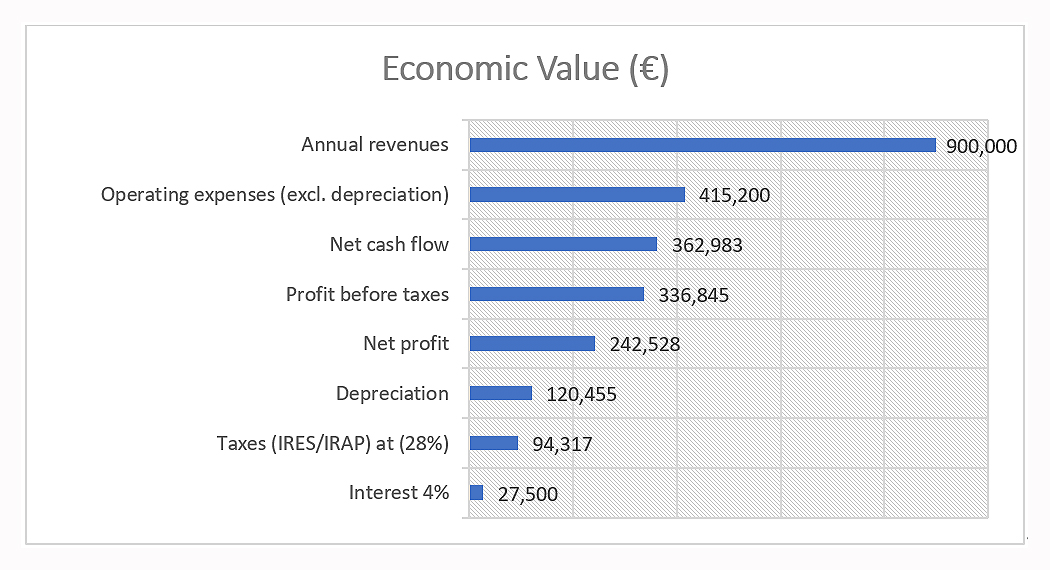 Figure 9.
Composition of the annual income statement of the smart road project, illustrating the relative contributions of revenues, operating expenses, depreciation, interest costs, taxes, net profit, and net cash flow.
Figure 9.
Composition of the annual income statement of the smart road project, illustrating the relative contributions of revenues, operating expenses, depreciation, interest costs, taxes, net profit, and net cash flow.
Initially, a 10% public contribution was assumed. This choice was deliberately conservative: a 10% grant represents a minimum, realistic, and defensible assumption in an academic thesis, as it avoids overstating public aid. A higher share (e.g., 30%) would have been more optimistic but less credible in the absence of a specific funding call. The 10% assumption demonstrated that the project could remain viable even with limited public support. In terms of the impact on the financial plan, without a public contribution the total investment would have been entirely financed through debt and equity. With a 10% public contribution (€295,500), the debt requirement and, consequently, the interest expenses are reduced.
However, with an initial investment of approximately €3 million and a public contribution of only 10%, the analysis of net cash flows used in the NPV calculation showed that the investment was not financially sustainable under those assumptions. Based on these results, the option of increasing the public contribution was evaluated.
A public contribution in the 10–30% range is considered plausible for this type of investment. The contribution was therefore increased to 20%, which reduces the initial private investment requirement and slightly increases net cash flows. This improvement is achieved through a modest integration of annual revenues, derived not only from smart tolling but also from vehicle-based sponsorships, increasing annual revenues from €800,000 to €900,000. Under these revised assumptions, the investment becomes not only sustainable but also economically profitable.
The remaining portion of the investment is financed through two types of loans:
●
This financing is granted at a reduced interest rate compared to market conditions and is typically provided by public or semi-public institutions (e.g., PNRR funds, Horizon Europe, EIB–European Investment Bank, Invitalia, Cassa Depositi e Prestiti). The 1% interest rate is a “policy rate”, designed to promote innovative projects such as smart roads. In this case, the concessional loan amounts to €472,327, corresponding to 22.2% of the remaining investment after deducting the public contribution.
●
This loan is provided by the traditional banking system (commercial banks and credit institutions). The interest rate reflects market conditions, including ECB rates and bank spreads. A 4% rate is assumed, which is realistic for medium- to long-term infrastructure financing. This loan amounts to €1,655,272.80, corresponding to 77.8% of the remaining investment after the public contribution.
The total initial investment amounts to €2,659,500, including technical costs, interest accrued during construction, authorization costs, and contingencies. The financial plan concludes with the calculation of the annual instalments for both the concessional and ordinary loans, computed using the constant instalment (French amortization) method. The financing structure of the investment, including public contributions, subsidized financing, and ordinary bank loans, is detailed in Table 4, which also reports the annual loan instalments calculated using the constant instalment (French amortization) method.
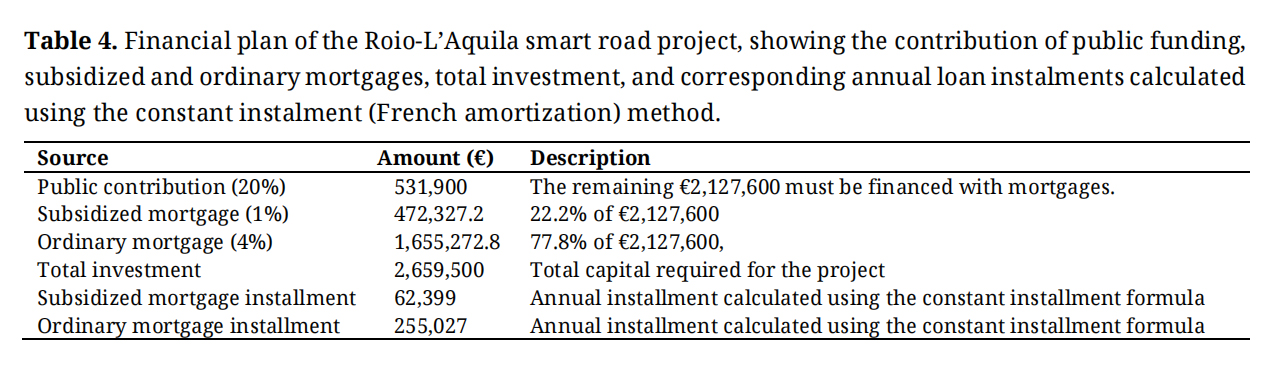 Table 4.
Financial plan of the Roio-L’Aquila smart road project, showing the contribution of public funding, subsidized and ordinary mortgages, total investment, and corresponding annual loan instalments calculated using the constant instalment (French amortization) method.
Table 4.
Financial plan of the Roio-L’Aquila smart road project, showing the contribution of public funding, subsidized and ordinary mortgages, total investment, and corresponding annual loan instalments calculated using the constant instalment (French amortization) method.
The key financial performance indicators used to evaluate the economic feasibility of the project are summarized in Table 5. The key financial indicators used to assess the actual feasibility of the investment, highlighting its economic sustainability, long-term durability, and overall financial robustness. The indicators considered in the analysis are NPV, IRR, and Payback Period. The NPV is calculated considering the annual net cash flow of €362,983, minus replacement costs in years 7 and 14, an initial investment of −€2,659,500, a discount rate of 4% (0.04), and a project lifetime of 20 years. A 4% discount rate was adopted instead of a more conservative 8%. Although an 8% rate could be justified by revenue uncertainty, the selected rate reflects the public nature of the infrastructure. As this is a public road rather than a private investment, the project is not designed to maximize profits. Public funding significantly reduces financial risk, and the primary objectives are sustainability and innovation, with profitability representing an additional benefit rather than the main goal.
Under these assumptions, the project yields a NPV of €1,540,264.90 over a 20-year horizon for a 5 km road section (Roio–L’Aquila), indicating strong economic viability. The IRR represents the discount rate at which the NPV becomes zero. For this project, the IRR is 9.75%, confirming that the investment remains profitable and well above the selected discount rate.
The Payback Period represents the number of years required to recover the initial investment. The undiscounted Payback Period is 9 years. This measure is obtained by cumulatively summing the nominal cash flows without considering the time value of money. The discounted Payback Period, calculated using a 4% discount rate, is 11 years. In this case, the cash flows are first discounted to their present value using the selected discount rate.
The difference between the undiscounted and discounted Payback Period lies in the treatment of the time value of money. In the undiscounted Payback approach, cash flows are summed as they occur without applying any discounting. For example, if the initial investment is €1,000,000 and the annual cash flow is €250,000, the cumulative cash flow reaches €1,000,000 after 4 years, resulting in a Payback Period of 4 years. In the discounted Payback approach, cash flows are first discounted using the chosen discount rate. For instance, at a 4% discount rate, a €250,000 cash flow received in year 1 is worth approximately €240,000 in present value terms. Consequently, more than 4 years may be required to recover the initial investment, possibly around 5 years.
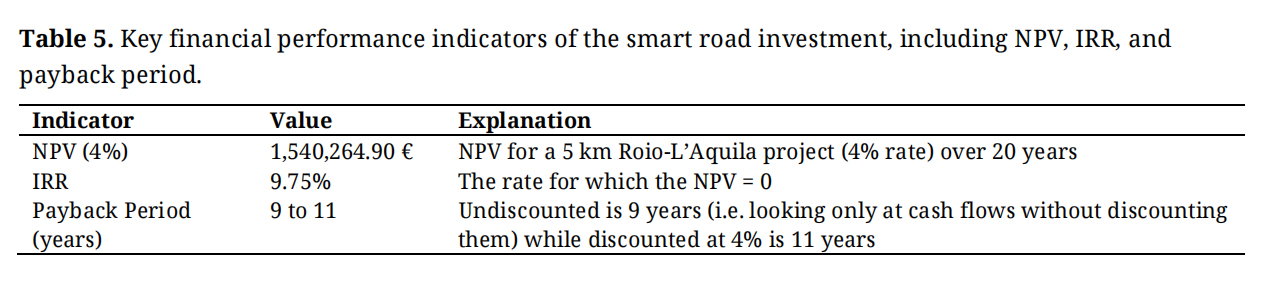 Table 5.
Key financial performance indicators of the smart road investment, including NPV, IRR, and payback period.
Table 5.
Key financial performance indicators of the smart road investment, including NPV, IRR, and payback period.
Environmental benefits associated with intelligent transportation infrastructures are commonly related to smoother traffic flow, reduced stop-and-go driving patterns, and improved vehicle trajectory optimization enabled by real-time vehicle–infrastructure communication. Several studies have shown that connected vehicle technologies and cooperative intelligent transportation systems can reduce fuel consumption and CO2 emissions by improving traffic flow stability and reducing unnecessary acceleration–deceleration cycles [40,47]. Additional research on smart mobility infrastructures and connected vehicle environments further confirms that cooperative ITS deployment can contribute to measurable emission reductions through optimized traffic management and improved mobility patterns [2,48]. Based on these literature benchmarks, which typically report emission reductions in the range of approximately 5–15% depending on traffic density and infrastructure configuration, an indicative estimate of environmental benefits can be derived for the proposed Roio–L’Aquila smart corridor. Considering typical European passenger vehicle emission factors of approximately 120–140 g CO2 per vehicle-kilometer under mixed traffic conditions, the deployment of cooperative ITS and V2X-enabled traffic management could potentially achieve emission reductions on the order of approximately 10–14 g CO2 per vehicle-kilometer compared with conventional traffic conditions. These values represent literature-based benchmark estimates intended to provide an order-of-magnitude indication of environmental benefits associated with intelligent mobility infrastructures.
From an economic standpoint, the financial evaluation produced clear evidence of long-term project viability. The calculation of key financial indicators confirmed positive performance across multiple metrics. The NPV reached €1.54 million at a discount rate of 4%, indicating that the financial benefits outweigh the initial investment over the analysis horizon. The IRR was measured at 9.75%, exceeding the conservative benchmark rate, and validating the attractiveness of the project for potential investors. Furthermore, the payback period was found to be 9 years in absolute terms, or 11 years when discounted, aligning with typical timescales for large-scale smart infrastructure investments. The analysis considered reductions of 10%, 20%, and 30% in annual revenues, reflecting conservative and adverse economic scenarios. The outcomes showed that even under a 10% reduction, the NPV remained strongly positive, while the IRR decreased only marginally. At a 20% reduction, both indicators declined but remained above the viability threshold, ensuring continued feasibility. Only under the most conservative scenario, with a 30% revenue decrease, did the NPV approach the break-even point; however, it remained marginally positive, confirming that the project maintains resilience even under significant financial stress. The robustness of the investment under adverse revenue conditions is assessed through the sensitivity analysis reported in Table 6.
Potential cost-side uncertainties related to technological upgrades and long-term maintenance requirements of sensing infrastructures may also influence the economic performance of smart road systems and represent a relevant direction for future research.
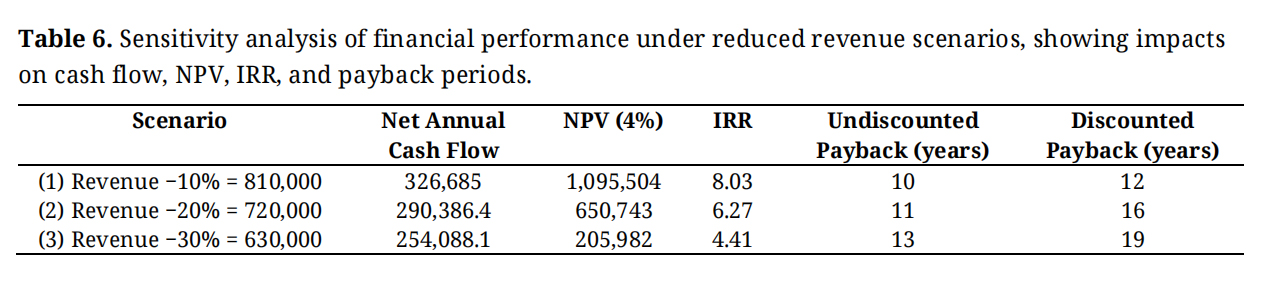 Table 6.
Sensitivity analysis of financial performance under reduced revenue scenarios, showing impacts on cash flow, NPV, IRR, and payback periods.
Table 6.
Sensitivity analysis of financial performance under reduced revenue scenarios, showing impacts on cash flow, NPV, IRR, and payback periods.
This study provides a comprehensive assessment of the technical and economic feasibility of implementing an intelligent mobility corridor designed for autonomous and connected vehicles in a complex, hilly environment. The investigation demonstrates that smart road technologies, often tested in flat, densely urbanized contexts, can be effectively adapted to territories characterized by irregular topography, mixed land-use patterns, and variable environmental conditions. This contributes to closing a significant gap in current research, which frequently focuses on idealized or highly controlled environments, overlooking the operational challenges of real-world, morphologically complex regions. The findings highlight that the deployment of advanced sensing systems, V2X communication, and AI-driven monitoring is not only technologically viable but can significantly enhance road safety, optimize traffic flows, and reduce environmental impacts. In particular, the integration of redundant multi-sensor architectures proved essential for maintaining reliable perception under adverse weather or visibility conditions, which are common in elevated or uneven landscapes. These insights provide valuable guidance for regions worldwide seeking to introduce autonomous vehicle corridors in non-flat, climate-exposed, or sparsely urbanized settings. From an economic standpoint, the financial evaluation confirms that intelligent mobility infrastructure can be sustainable when supported by a balanced funding structure, long-term strategic planning, and diversified revenue streams such as data services, public-private partnerships, and ecosystem-based value creation. Positive economic indicators, including NPV, IRR, and Payback Period estimates, suggest that smart road networks can generate benefits that extend far beyond direct financial returns, encompassing increased safety, reduced congestion costs, improved asset management, and strengthened regional competitiveness. Additionally, the analysis shows that innovation ecosystems involving universities, technology developers, institutional stakeholders, and industry partners play a crucial role in enabling the successful adoption of autonomous mobility systems. Such collaborations accelerate knowledge transfer, enhance testing capabilities, and support the development of scalable and replicable models [19].
Al-Yarimi [62] reported similar results, demonstrating that in V2X communication networks, the use of V2I and V2X communication data by SafeRouteX, enhanced road safety. These findings are particularly relevant for countries and regions aiming to create testbeds or “living laboratories” for emerging mobility technologies. Similar results have been reported by [49,50]. These studies underline that key challenges remain, including the difficulty of adapting regulatory frameworks into machine-readable formats, the complexity of data management, and the high level of technical expertise required, which hinder large-scale adoption. Finally, investment in public datasets and adaptive algorithms will be essential to fully unlock the potential of this integration. Beyond mobility, the work provides a foundation for broader smart territory developments, including intelligent lighting, adaptive traffic management, emergency response systems, and dynamic charging solutions for electric vehicles. These advancements contribute to a long-term vision of resilient and sustainable infrastructure capable of supporting future mobility demands. In summary, this study demonstrates that intelligent mobility corridors can be effectively implemented even in challenging terrains, offering a scalable and impactful model for regions worldwide. By combining technological innovation, economic sustainability, and strategic governance, such systems have the potential to transform mobility, increase safety, and enhance the overall quality of life. The broader significance of this work lies in its applicability to diverse geographic contexts, providing a roadmap for the global transition toward safer, smarter, and more sustainable transportation networks. In addition to technical and economic viability, recent studies emphasize that social acceptability is a critical enabler of autonomous mobility deployment, with user perceptions of safety, self-efficacy, and performance playing a decisive role in adoption [63], and this aspect needs to be further evaluated in diverse scenarios.
Another important aspect influencing the deployment of smart mobility infrastructures concerns public acceptance and stakeholder perception of autonomous and connected transport technologies. Previous studies have shown that the adoption of intelligent transportation systems and autonomous vehicles is strongly influenced by social trust, perceived safety, and institutional support. Although the present study focuses primarily on the technical and economic feasibility of the proposed corridor, future research could further investigate stakeholder acceptance through targeted surveys involving local residents, drivers, and public authorities responsible for traffic management.
Looking ahead, several directions for future development emerge from this research:
●
●
●
●
●
●
The dataset of the study is available from the authors upon reasonable request.
Conceptualization, FC and VS; methodology, FC, VDR, and VS; software, FC and VDR; validation, FC and ME; formal analysis, FC and VDR; investigation, FC and VDR; resources, FC, VDR, and VS; data curation, FC, ME, VDR, and VS; writing—original draft preparation, FC, ME, and VDR; writing—review and editing, FC and ME; visualization, FC, ME, and VDR; supervision, FC and VS; project administration, FC and VS; funding acquisition, FC and VS. All authors have read and agreed to the published version of the manuscript.
The authors declare that they have no conflicts of interest.
This research received no funding.
1.
2.
3.
4.

Copyright © Hapres Co., Ltd. Privacy Policy | Terms and Conditions




